
Вопрос от Анонимного юзера 01 марта 2025 20:35
В
Ответ нейросети
01 марта 2025 20:35
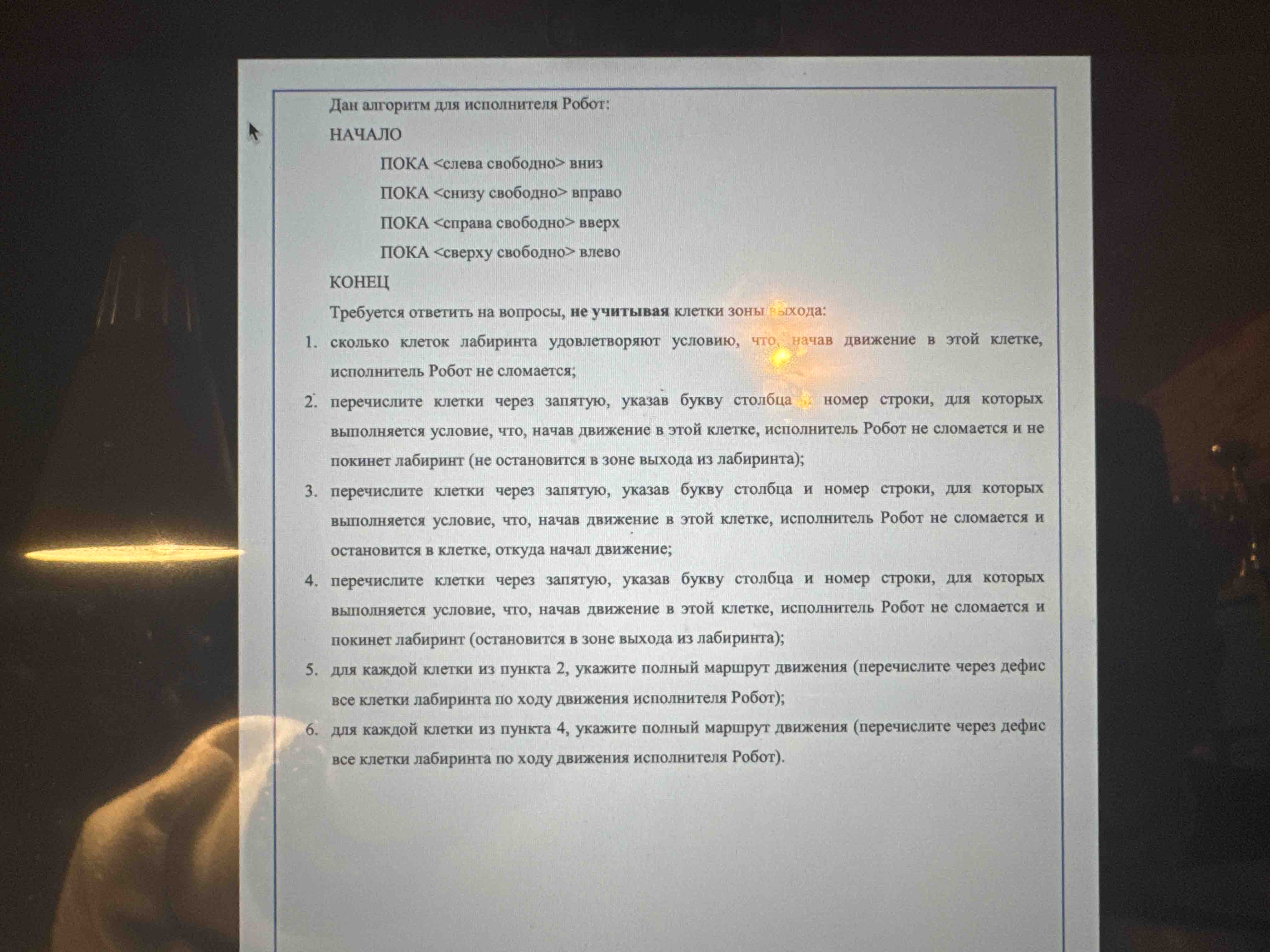
Для выполнения предложенного алгоритма для исполнителя Робот, давайте разберем шаги программы:
Алгоритм для исполнителя Робот:
НАЧАЛО
- Начинаем выполнение программы.
Пока <слева свободно> ВНИЗ
- Робот будет двигаться вниз, пока слева от него есть свободное пространство.
ПОКА <снизу свободно> ВНИЗ
- Робот будет двигаться вниз, пока под ним есть свободное место.
ПОКА <справа свободно> ВПРАВО
- После того как робот достигнет нижней границы, он будет двигаться вправо, пока справа от него есть свободное пространство.
ПОКА <сверху свободно> ВВЕРХ
- После достижения правой границы робот будет подниматься вверх, пока сверху свободно.
ПОКА <слева свободно> ВЛЕВО
- После достижения верхней границы робот будет двигаться влево, пока слева есть свободное пространство.
КОНЕЦ
- Завершаем выполнение программы.
Пояснение к задаче:
Постановка задачи: Мы движемся по периметру лабиринта, начиная с начальной позиции, которая находится слева внизу.
Реализация условий:
- Циклы используются для обеспечения перемещения робота до границ зоны движения, прежде чем изменить направление.
- Благодаря таким циклам робот обходит пространство, пока не достигнет стенки или другого препятствия.
Практические аспекты выполнения:
- Такой алгоритм полезен для обхода по краю сетки или лабиринта, обеспечивая движение вдоль стен.
Ответ на вопросы:
- Робот будет двигаться по периметру зоны на основе заданного на его стартовой позиции свободного пространства, изменяя направление каждый раз, когда столкнётся с препятствием.
- Таким образом, в зависимости от начальной конфигурации окружающей обстановки, робот перемещается по "треугольному" маршруту от своей начальной позиции, возвращаясь к позиции через несколько вилков движения.
Этот алгоритм иллюстрирует простую систему навигации по закону правой (или левой) руки.
Понравился ответ?
Задай свой вопрос
Напиши любую задачу или вопрос, а нейросеть её решит



