
Вопрос от Анонимного юзера 20 февраля 2025 18:25
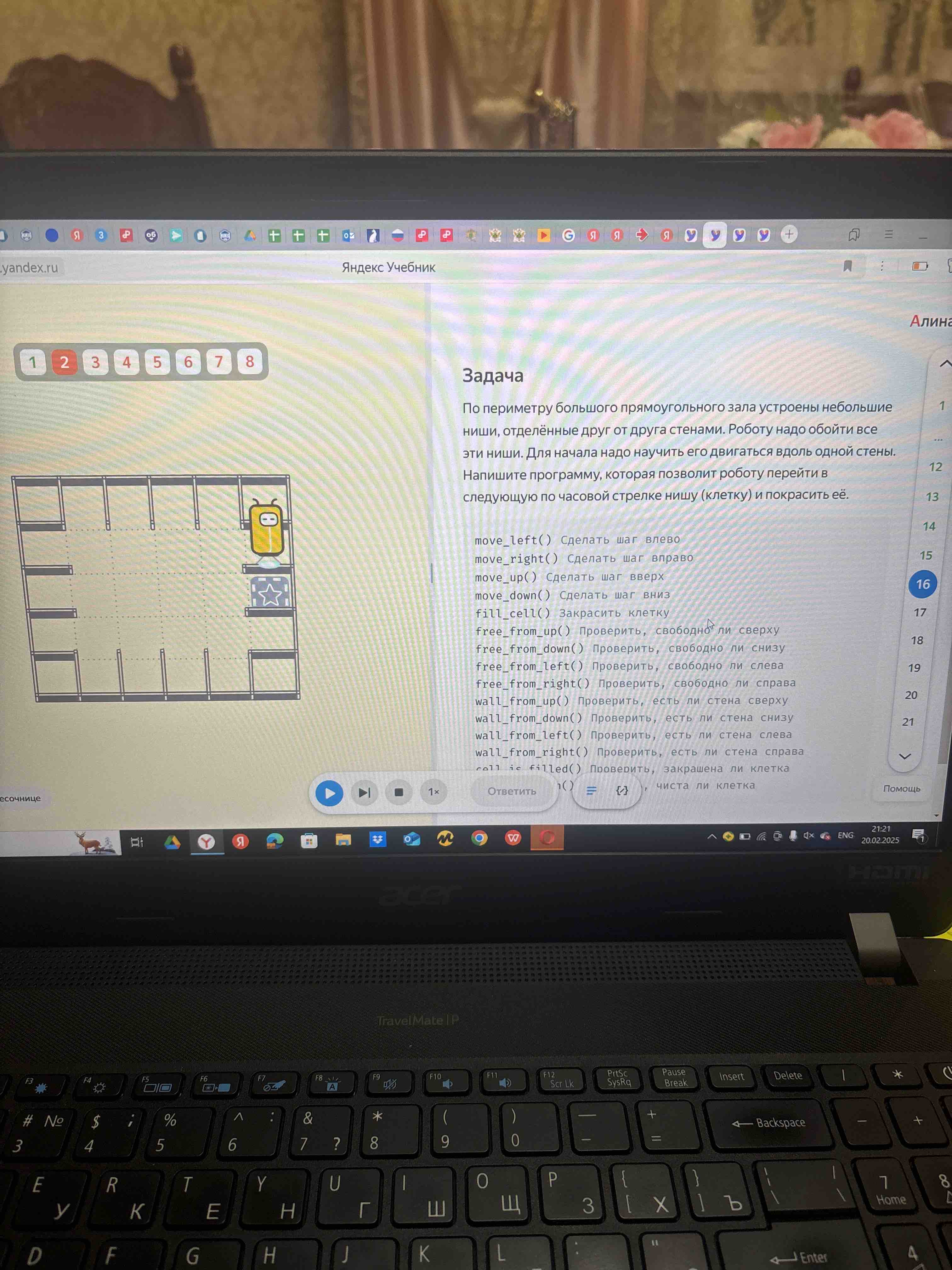
По периметру большого прямоугольного зала устроены небольшие ниши, отделённые друг от друга стенами. Роботу надо обойти все эти ниши. Для начала надо научить его двигаться вдоль одной стены. Напиши программу, которая позволит роботу перейти в следующую по часовой стрелке нишу( клетку) и покрасить её.
Ответ нейросети
20 февраля 2025 18:25
Понравился ответ?
Задай свой вопрос
Напиши любую задачу или вопрос, а нейросеть её решит



